Page Not Found
Page not found. Your pixels are in another canvas.

A list of all the posts and pages found on the site. For you robots out there is an XML version available for digesting as well.
Page not found. Your pixels are in another canvas.
About me
This is a page not in th emain menu
Published:
This post will show up by default. To disable scheduling of future posts, edit config.yml and set future: false.
Published:
This is a sample blog post. Lorem ipsum I can’t remember the rest of lorem ipsum and don’t have an internet connection right now. Testing testing testing this blog post. Blog posts are cool.
Published:
This is a sample blog post. Lorem ipsum I can’t remember the rest of lorem ipsum and don’t have an internet connection right now. Testing testing testing this blog post. Blog posts are cool.
Published:
This is a sample blog post. Lorem ipsum I can’t remember the rest of lorem ipsum and don’t have an internet connection right now. Testing testing testing this blog post. Blog posts are cool.
Published:
This is a sample blog post. Lorem ipsum I can’t remember the rest of lorem ipsum and don’t have an internet connection right now. Testing testing testing this blog post. Blog posts are cool.
Published in Preprint

The diversity of touch sensor designs complicates general-purpose tactile processing. We address this by training a diffusion model for cross-modal prediction, translating tactile signals between GelSlim and Soft Bubble sensors. This enables sensor-specific methods to be applied across sensor types.
Published in International Conference on Robotics and Automation (ICRA)
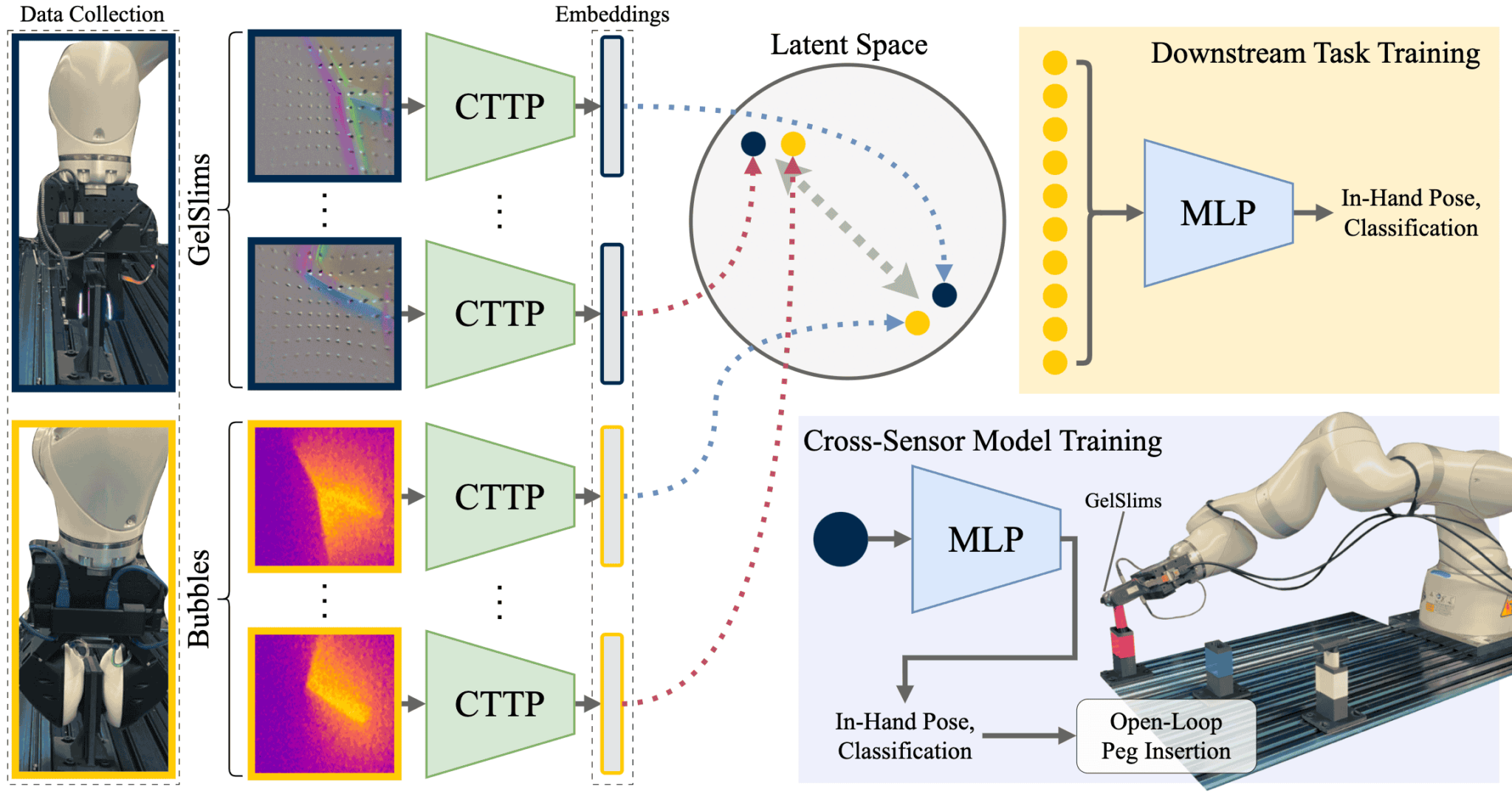
We present a contrastive self-supervised learning method to unify tactile feedback across different sensors, using paired tactile data. By treating paired signals as positives and unpaired ones as negatives, our approach learns a sensor-agnostic latent representation, capturing shared information without relying on reconstruction or task-specific supervision.
Published in 9th Conference on Robotic Learning (CoRL)
We prenset a method for tansferring manipulation policies between different tactile sensors by generating cross-sensor tactile signals. Using either a paired diffusion model (T2T) or an unpaired depth-based approach (T2D2), the method enables zero-shot policy transfer without retraining. We demonstrate it on a marble rolling task, where policies learned with one sensor are successfully applied to another.
Published:
This is a description of your talk, which is a markdown files that can be all markdown-ified like any other post. Yay markdown!
Published:
This is a description of your conference proceedings talk, note the different field in type. You can put anything in this field.
Graduate Course, University of Michigan, Robotics, Fall 2020 & Fall 2021
This course is an introduction to the field of manipulation. The course covers the fundamentals of manipulation, including kinematics, dynamics, control, and planning. The course also covers the fundamentals of grasping and manipulation, including grasp planning, grasp stability, and manipulation planning.
Graduate course, University of Michigan, Robotics, Winter 2023
An introduction to modern machine learning methods for control and planning in robotics. Topics include function approximation, learning dynamics, using learned dynamics in control and planning, handling uncertainty in learned models, learning from demonstration, and model-based and model-free reinforcement learning. Students implement the above learning algorithms on robots in simulation.